Roverview
In 2024, the ASE/Rover was born. A fast, efficient and powerful vehicle that can be easily extended to fit your research needs. In this hardware exploration, one can find all necessary documentation to repair or extend the Rover. Keep in mind that, since the Rover is loaned to you, you must ask explicit permission to make any hardware (mechanical and/or electronic) modifications to it.

Max Gallup
Founding Member, Ex-Hardware Lead and Ex-Project Administrator
Compute
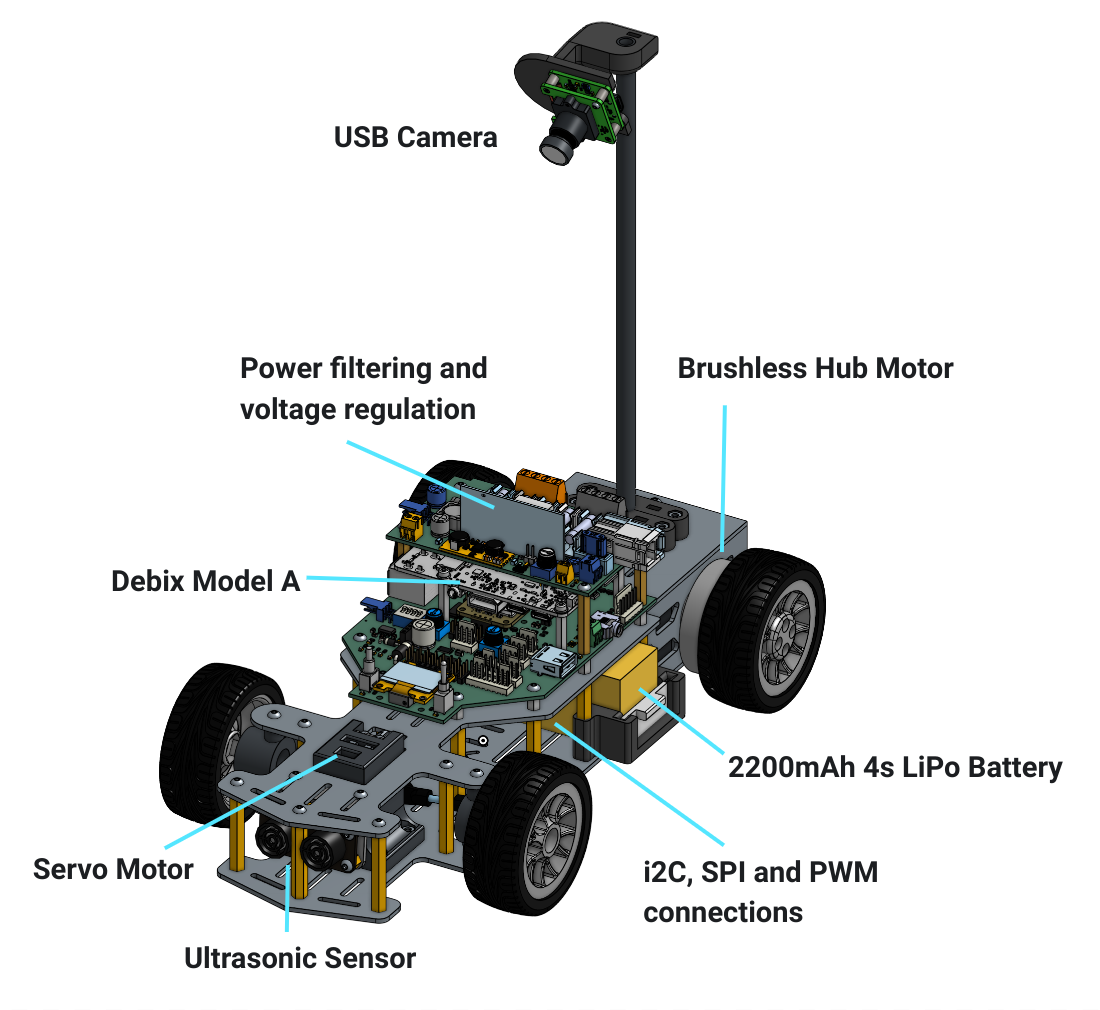
The brain of the Rover is the Debix Model A: a versatile linux-based Single-Board Computer (SBC), featuring 8GB of memory and a dedicated NPU, this board enables the Rover to be programmed with flexibility and ease. It also features the necessary hardware interconnects that are extended via our dedicated carrier PCB. We decided to move away from micro-controllers, since they typically tend to have less resources available, but also because students would be forced to do embedded programming. Whereas with a linux-based system, we are able to leverage the existing software development ecosystem that linux supports, which opens up doors to virtually any application. We provide students with a pre-configured Ubuntu installation adapted to the Rover framework, but you are allowed to bring a custom OS or installation if desired (though, we do not offer support for it).
Interconnectivity
The benefits of using a single board computer that runs an operating system is that it makes conventional and industry standard sensors plug-and-play. USB devices such as cameras or scanners can be easily mounted on the Rover. Furthermore, the Carrier Board exposes all of the interconnects from the Debix and even adds some niceties such as a display, status LEDs, some switches and a button. Most importantly, it exposes the necessary hardware connections for running i2C, SPI or PWM devices, like the Motors and the Servo. On top of the Carrier Board, sits the Power Board which exposes raw or filtered power straight from the battery with protections to support any device to be added.
Drivetrain
Two powerful direct-drive motors in the back offer smooth control of the rover as well as active braking. While the Rover was designed with extensibility in mind, the ASE-Team also used it to win races. The smooth operation of the Field Oriented Controlled (FOC) Motors enables the car to reach a top speed of about 5 m/s and precise steering control enables the Rover to make sharp turns.
On every start the motors need to be clear of the ground for calibration. It is therefore best practice to place the rover on a platform while it is booting.
There is a PWM/Servo driver on the carrier board that on power down can remember values. This can sometimes be a rare cause of unexpected behaviour.
Battery
By default, the Rover comes equipped with a 2200mAh 14.8V (nominal) LiPo battery, which on a single charge allows a runtime of ~60 minutes assuming normal operating load. Smaller or larger batteries can be fit to allow for specific research needs.
The framework has built-in safety measures in place to prevent over- or undercharging the battery. Take appropriate measures when dealing with batteries and always ask a team member for help if you are in doubt.
Sensors
The Rover comes equipped with a 640 x 480, 30 FPS camera and an ultrasound sensor (see electronic components) that can be used for basic sensing. Additional sensors can be installed (after approval from the team).
Diagram